Biography
I hold expertise as a robotics engineer and mechatronics specialist, having earned a Ph.D. in Mechatronics from the Department of Engineering Sciences at the University of Agder. My scholarly pursuits gravitate toward the realms of robotics, flexible manipulators, as well as dynamics and control.
Download my resumé.
- Robotics
- Flexible Manipulators
- Dynamics
- Control
-
PhD Research Fellow in Engineering Science, Specialization in Mechatronics, Feb. 2019 - Jul. 2022
University of Agder, Norway
-
University Master's Degree Erasmus Mundus in Advanced Robotics, Aug. 2016 - Jul. 2017
Jaume I University, Spain
-
Master of Science in Robotics Engineering, Sep. 2015 - Jul. 2016
University of Genoa, Italy
-
Bachelor of Engineering in Electrical and Electronics Engineering, Jul. 2010 - Apr. 2014
PSNA College of Engineering and Technology, Anna University, India
Software Skills
Experience
- Development of IRBCAM: a robot simulation software.
- Development of parallel kinematic machines.
Modeling and Control of Flexible Link Manipulators.
- Dynamic modeling of multi-link flexible manipulators.
- Flexible link deflection estimation using a high speed camera.
- Flexible link deflection estimation using a tip-mounted inertial sensor (IMU).
- Interfacing Leica laser tracker with real-time Linux kernel using EtherCAT.
- Intrinsic and extrinsic calibration of camera and LiDAR.
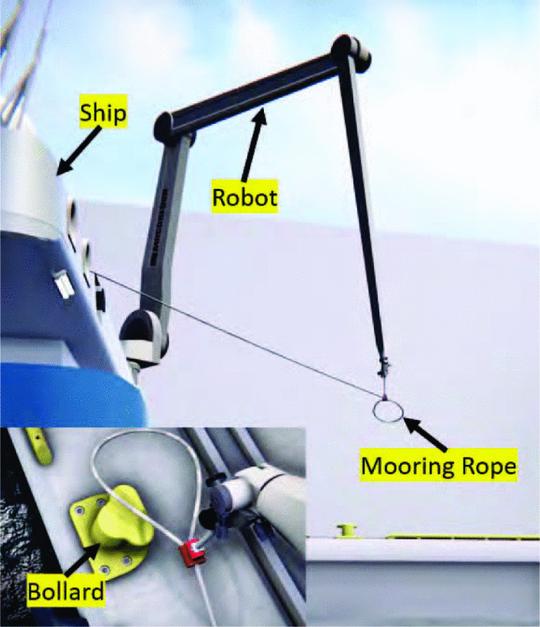
- Camera-LiDAR data fusion for autonomous mooring operation using deep learning.
- Design and commissioning of a three-link flexible arm in the motion lab at the University of Agder.
- Static deflection compensation and oscillation damping control of flexible link manipulators.
- Industrial IT and Robotics (Undergraduate Courses).
- Leading practical/lab and project sessions.
- Student supervision.
- Integration of vision, manipulation and sensor modules in warehouse sorting project.
- Development of drivers for controlling different manipulators (Yaskawa, Fanuc, and Kawasaki).
- Automatic calibration of cameras, force-torque sensor, robot and obstacles with high precision.
- Development of generalized motion planning library for different manipulators.
Accolades
Projects

Gallery

Publications
Contact
- [email protected]
- +47-92512969
- Jon Lilletuns Vei 17, Grimstad, Agder 4879
- Monday-Friday 08:00 to 16:00